容器运行时(CRI)
容器运行时接口(Container Runtime Interface),简称 CRI。CRI 中定义了 容器 和 镜像 的服务的接口,因为容器运行时与镜像的生命周期是彼此隔离的,因此需要定义两个服务。该接口使用 Protocol Buffer,基于 gRPC,在 Kubernetes v1.10 + 版本中是在 pkg/kubelet/apis/cri/runtime/v1alpha2 的 api.proto 中定义的。
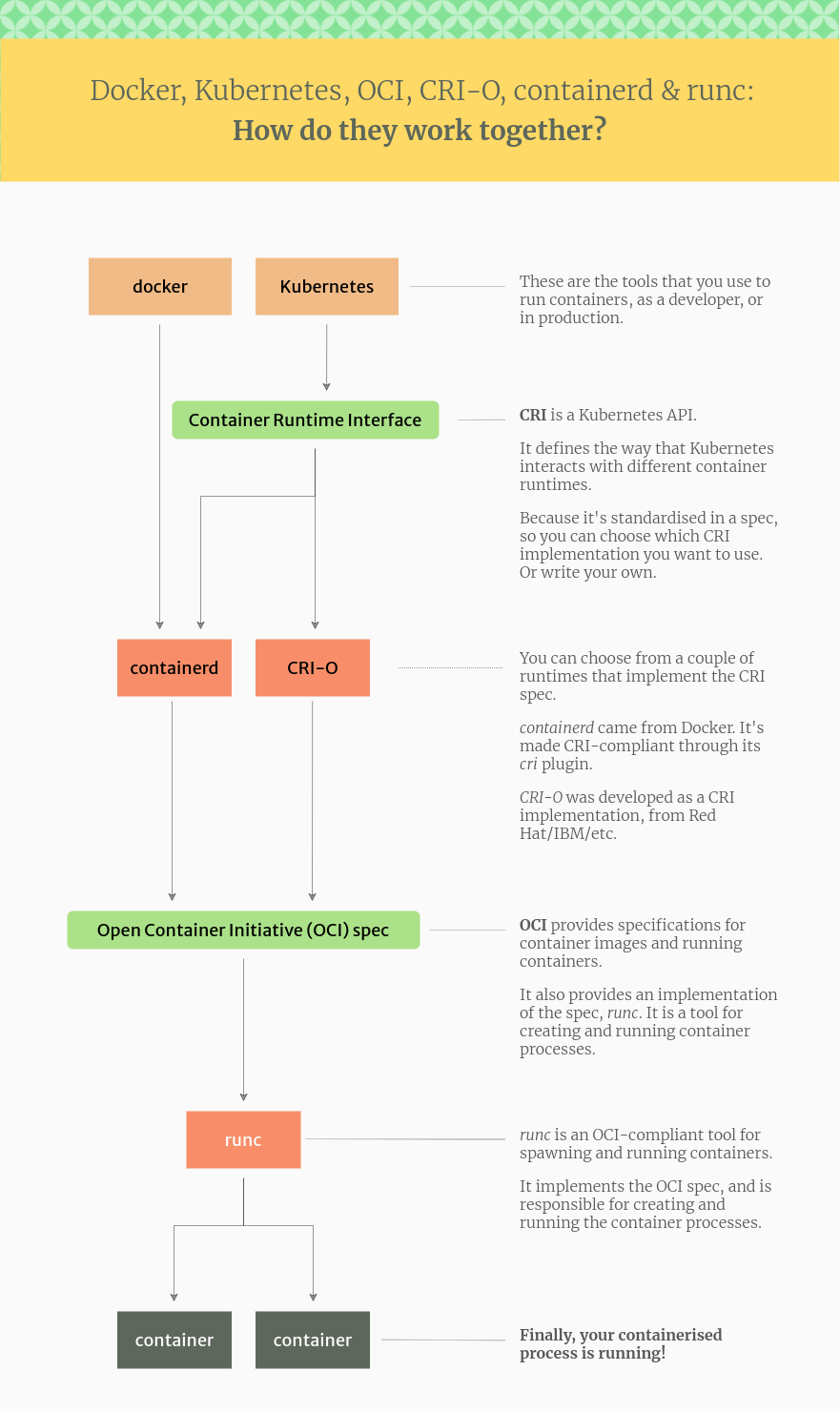
下图是docker,k8s,oci,cri-o,containerd,runc的关系图:
ref: https://www.tutorialworks.com/difference-docker-containerd-runc-crio-oci/
CRI 架构
Container Runtime 实现了 CRI gRPC Server,包括 RuntimeService 和 ImageService。该 gRPC Server 需要监听本地的 Unix socket,而 kubelet 则作为 gRPC Client 运行。
protocol buffers API包含了两个gRPC服务:ImageService和RuntimeService。ImageService提供了从镜像仓库拉取、查看、和移除镜像的RPC。RuntimeSerivce包含了Pods和容器生命周期管理的RPC,以及跟容器交互的调用(exec/attach/port-forward)。一个单块的容器运行时能够管理镜像和容器(例如:Docker和Rkt),并且通过同一个套接字同时提供这两种服务。这个套接字可以在Kubelet里通过标识–container-runtime-endpoint和–image-service-endpoint进行设置。
启用 CRI
除非集成了 rktnetes,否则 CRI 都是被默认启用了,从 Kubernetes 1.7 版本开始,旧的预集成的 docker CRI 已经被移除。
要想启用 CRI 只需要在 kubelet 的启动参数重传入此参数:–container-runtime-endpoint 远程运行时服务的端点。当前 Linux 上支持 unix socket,windows 上支持 tcp。例如:unix:///var/run/dockershim.sock、 tcp://localhost:373,默认是 unix:///var/run/dockershim.sock,即默认使用本地的 docker 作为容器运行时。
CRI 接口
Kubernetes 1.9 中的 CRI 接口在 api.proto 中的定义如下:
service RuntimeService {
// Version returns the runtime name, runtime version, and runtime API version.
rpc Version (VersionRequest) returns (VersionResponse) {}
// RunPodSandbox creates and starts a pod-level sandbox. Runtimes must ensure
//the sandbox is in the ready state on success.
rpc RunPodSandbox (RunPodSandboxRequest) returns (RunPodSandboxResponse) {}
// StopPodSandbox stops any running process that is part of the sandbox and
//reclaims network resources (e.g., IP addresses) allocated to the sandbox.
// If there are any running containers in the sandbox, they must be forcibly
//terminated.
// This call is idempotent, and must not return an error if all relevant
//resources have already been reclaimed. kubelet will call StopPodSandbox
//at least once before calling RemovePodSandbox. It will also attempt to
//reclaim resources eagerly, as soon as a sandbox is not needed. Hence,
//multiple StopPodSandbox calls are expected.
rpc StopPodSandbox (StopPodSandboxReq
...
}
// ImageService defines the public APIs for managing images.
service ImageService {
// ListImages lists existing images.
rpc ListImages (ListImagesRequest) returns (ListImagesResponse) {}
// ImageStatus returns the status of the image. If the image is not
//present, returns a response with ImageStatusResponse.Image set to
//nil.
rpc ImageStatus (ImageStatusRequest) returns (ImageStatusResponse) {}
// PullImage pulls an image with authentication config.
rpc PullImage (PullImageRequest) returns (PullImageResponse) {}
// RemoveImage removes the image.
// This call is idempotent, and must not return an error if the image has
//already been removed.
rpc RemoveImage (RemoveImageRequest) returns (RemoveImageResponse) {}
// ImageFSInfo returns information of the filesystem that is used to store images.
rpc ImageFsInfo (ImageFsInfoRequest) returns (ImageFsInfoResponse) {}}这其中包含了两个 gRPC 服务:
RuntimeService:容器和 Sandbox 运行时管理。 ImageService:提供了从镜像仓库拉取、查看、和移除镜像的 RPC。
当前支持的 CRI 后端
目前支持 CRI 的后端有:
- cri-o:cri-o 是 Kubernetes 的 CRI 标准的实现,并且允许 Kubernetes 间接使用 OCI 兼容的容器运行时,可以把 cri-o 看成 Kubernetes 使用 OCI 兼容的容器运行时的中间层。(runc)
- containerd:基于 Containerd 的 Kubernetes CRI 实现 (runc)
- rkt:由 CoreOS 主推的用来跟 docker 抗衡的容器运行时
- frakti:基于 hypervisor 的 CRI (runv)
- docker:Kuberentes 最初就开始支持的容器运行时,目前还没完全从 kubelet 中解耦,Docker 公司同时推广了 OCI 标准 (runc)
- pouch: 阿里的容器,基于hypervisor容器技术强隔离,p2p镜像分发,富容器技术。
CRI 是由 SIG-Node 来维护的。
通过 CRI-O 间接支持 CRI 的后端.
当前同样存在一些只实现了 OCI 标准的容器,但是它们可以通过 CRI-O 来作为 Kubernetes 的容器运行时。CRI-O 是 Kubernetes 的 CRI 标准的实现,并且允许 Kubernetes 间接使用 OCI 兼容的容器运行时。
- Clear Containers:由 Intel 推出的兼容 OCI 容器运行时,可以通过 CRI-O 来兼容 CRI。
- Kata Containers:符合 OCI 规范,可以通过 CRI-O 或 Containerd CRI Plugin 来兼容 CRI。
- gVisor:由谷歌推出的容器运行时沙箱 (Experimental),可以通过 CRI-O 来兼容 CRI。
OCI规范
OCI规范(Open Container Initiative 开放容器标准),该规范包含两部分内容:容器运行时标准(runtime spec)、容器镜像标准(image spec)
OCI项目及兼容OCI规范的容器运行时:
- runc: 基于namespace,cgroup,seccomp&MAC技术实现的进程资源隔离
- runv: 基于Hypervisor,兼容OCI规范的虚拟机运行时
- kata-runtime: from the
Katacontainersproject,它将OCI规范实现为单个轻量级虚拟机(硬件虚拟化) - gVisor: Google推出的新运行时,比vm更轻量化,在sandbox中运行的虚拟内核,与vm有同样的强隔离性。但带来了额外的系统调用消耗
按照底层容器运行环境依托的技术分类,我们将容器运行时分为以下三类:
- OSContainerRuntime(基于进程隔离技术)
- HyperRuntime(基于Hypervisor技术)
- UnikernelRuntime(基于unikernel)
OSContainerRuntime
OSContainerRuntime下的Linux Container共享Linux内核,使用namespace、cgroup等技术隔离进程资源。namespace只包含了六项隔离(UTS、IPC、PID、Network、Mount、User),并非所有Linux资源都可以通过这些机制控制,比如时间和Keyring,另外,容器内的应用程序和常规应用程序使用相同的方式访问系统资源,直接对主机内核进行系统调用。因此即使有了很多限制,内核仍然向恶意程序暴露过多的攻击面。
HyperRuntime
HyperRuntime下的VM Container容器各自拥有独立Linux内核,资源隔离比Linux Container更彻底。但并不是说使用VM容器用户就可以高枕无忧,只是VM容器的攻击面比Linux容器小了很多,黑客要逃逸到宿主机就只剩下Hypervisor这个入口,所以说没有绝对的安全,相对来说VM容器更安全。另一方面,VM容器的性能比不上Linux容器,因为Hypervisor这一层带来的性能损耗,在Linux容器这边是不存在的。
UnikernelRuntime
UnikernelRuntime下的容器同VM Container一样有着安全级别很高的运行环境,同样是使用Hypervisor技术进行容器隔离。简单来说Unikernel是一个运行在Hypervisor之上的libOS系统,而libOS是由应用程序和libraries一起构建出的操作系统。
unikernel的特点如下:性能好,应用程序和内核在同一地址空间,消除了用户态和内核态转换以及数据复制带来的开销。更精简的内核,去掉了多余的驱动、依赖包、服务等,最终打包镜像更小,启动速度更快。完全不可调试,在生产环境中如果遇到问题,只能依赖于收集到的日志进行排查,要不就是重启容器,原先熟悉的Linux排查方法和工具完全派不上用场。
目前实现了CRI的主流项目有:docker、containerd、CRI-O、Frakti、pouch,它们衔接Kubelet与运行时方式对比如下:
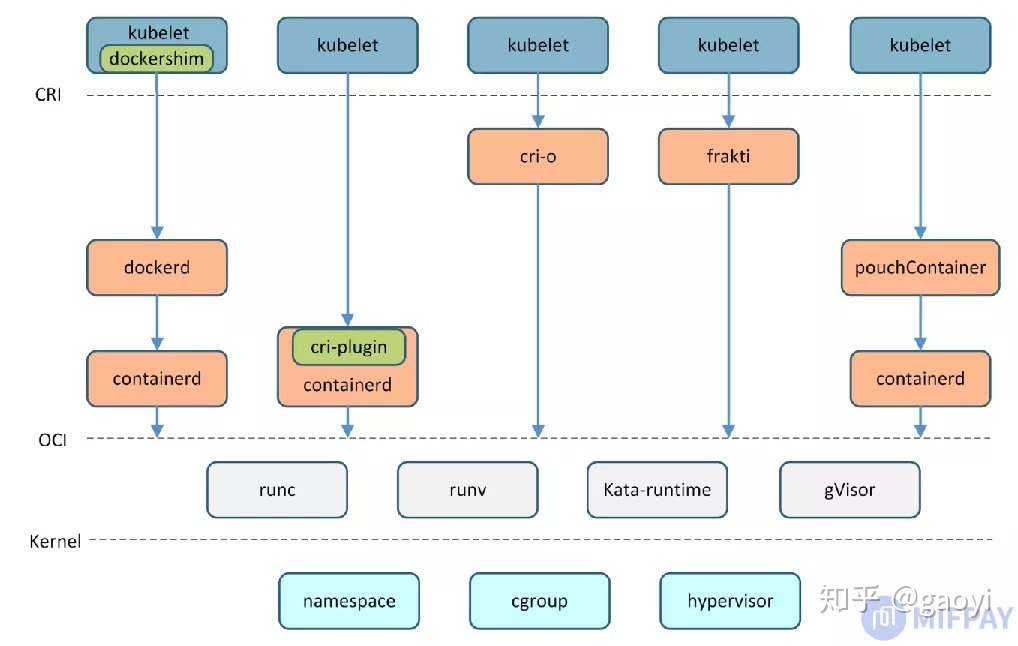
runtime对比
docker
最早原生支持的运行时,目前由于发展原因弃用。Kubernetes 只能与 CRI 通信,因此要与 Docker 通信,就必须使用桥接服务。因为docekr其实没有实现cri标准接口,是由一个叫做Dockershim的组件来做桥梁代理的。新版已经丢弃这个组件。
目前也可以使用cri-dockerd来继续使用docker engine作为后端。
containerd
Containerd项目是从早期的docker源码中提炼出来的,它使用CRI插件来向kubelet提供CRI接口服务。同时它也是docekr的runtime。
组件由Doekr组织提供支持。
cri-o
CRI-O完整实现CRI接口功能,并且严格兼容OCI标准,CRI-O比Containerd更专注,它只服务于Kubernetes(而Containerd除支持Kubernetes CRI,还可用于Docker Swarm),从官网上我们可以了解到CRI-O项目的功能边界:
组件由Red Hat组织提供支持。
rkt
当前可能有部分不兼容cri,略。
fraki
基于hypervisor虚拟机管理程序的容器运行时。具有更高的安全性,内核独立,混合运行。
PouchContainer
PouchContainer是阿里开源的容器引擎,它内部有一个CRI协议层和cri-manager模块,用于实现CRI shim功能。它的技术优势包括:
- 强隔离,包括的安全特性:基于Hypervisor的容器技术、lxcfs、目录磁盘配额、补丁Linux内核等。
- 基于P2P镜像分发,利用P2P技术在各节点间互传镜像,减小镜像仓库的下载压力,加快镜像下载速度。
- 富容器技术,PouchContainer的容器中除了运行业务应用本身之外,还有运维套件、系统服务、systemd进程管家等。
如何选择容器运行时
首先对比Containerd和CRI-O调用runc的方式,runc代码内置在Containerd内部,通过函数调用;
CRI-O是通过linux命令方式调用runc二进制文件,显然前者属于进程内的函数调用,在性能上Containerd更具优势。
其次对比runc和runv,这是两种完全不同的容器技术,runc创建的容器进程直接运行在宿主机内核上,而runv是运行在由Hypervisor虚拟出来的虚拟机上,后者占用的资源更多、启动速度慢,而且runv容器在调用底层硬件时(如CPU),中间多了一层虚拟硬件层,计算效率上不如runc容器。
- Containerd+runc: 安全中,性能开销低
- CRI-O: 安全中,性能开销中
- Frakti+runv: 安全高,性能开销高
k8s 支持多个runtime
为什么要支持多运行时呢?举个例子,有一个开放的云平台向外部用户提供容器服务,平台上运行有两种容器,一种是云平台管理用的容器(可信的),一种是用户部署的业务容器(不可信)。在这种场景下,我们希望使用runc运行可信容器(弱隔离但性能好),用runv运行不可信容器(强隔离安全性好)。面对这种需求,Kubernetes也给出了解决方案(使用API对象RuntimeClass支持多运行时)。
Kubelet从apiserver接收到的Pod Spec,如果Pod Spec中使用runtimeClassName指定了容器运行时,则在调用CRI接口的RunPodSandbox()函数时,会将runtimeClassName信息传递给CRI shim,然后CRI shim根据runtimeClassName去调用对应的容器运行时,为Pod创建一个隔离的运行环境。
RuntimeClass配置Kubernetes在v1.12中增加了RuntimeClass这个新API对象来支持多运行时(目的就是在一个woker节点上运行多种运行时)。在Kubernetes中启用RuntimeClass时需要注意,尽量保持当前Kubernetes集群中的节点在容器运行时方面的配置都是同构的,如果是异构的,那么需要借助node Affinity等功能来调度Pod到已部署有匹配容器运行时的节点。